Modeling, Sensing, and Automatic Control in Arc Welding
The demanding nature of manual welding—including the harsh environments with intense heat and fumes, as well as the physical load on the welder—makes arc welding a prime candidate for process automation. Automation offers the potential for welds of consistently high quality and accuracy, often meeting radiographic standards, and can be performed at high speeds.
The Complexity of the Arc Welding Process
Understanding the arc welding process reveals it to be a very complex system. The physics of welding involves intricate physical phenomena spanning electricity, heat, magnetism, light, and sound. Many welding processes necessitate the application of heat or pressure, or both, to create a suitable bond between the parts being joined.
Arc welding specifically utilizes an electric arc as the heat source to melt and fuse metals. Welding metallurgy, a related field, applies metallurgical principles to assess the rapid chemical and physical reactions that occur within seconds in a small volume of metal under thermal conditions vastly different from those in metal production or fabrication.
This inherent complexity underscores the challenges in achieving precise control and consistent results without advanced techniques.

Why Automation? Goals and Benefits
Achieving Weld Quality and Performance
Automation aims to deliver consistent, high-quality welds. A good weld is defined by its microstructure, minimal spatter, and accurate bead geometry. Key factors like cooling rate, metal transfer mode, and heat input must be tightly controlled.
Automated systems precisely regulate welding variables—current, voltage, travel speed—ensuring better weld penetration, bead formation, and temperature distribution than manual methods.
Addressing Practical Challenges
Beyond quality, automation addresses practical challenges inherent in welding. It can help to overcome the limitations of relying solely on welder skill and experience, which can vary.
Automated systems, particularly for processes like Gas Metal Arc Welding (GMAW), are highly suited for a wide range of applications and integration with robots, addressing the physical demands and harsh environments of manual welding.
By providing close control over parameters like travel rate and nozzle-to-work distance, automatic welding enables high accuracy and speed. While automation may be less tolerant of variations in root gap and fit-up compared to semi-automatic welding, it reduces start-stop breaks in long weld sequences.
Modeling Arc Welding Processes
Defining Welding Process Models
Modeling is a critical component for effective feedback controller design in welding. Essentially, modeling a welding process involves deriving a set of mathematical equations that describe the physical process, either through fundamental scientific principles or via statistical and experimental techniques.
A model provides a framework for describing and understanding the behavior of the welding system that is to be controlled.
Key Phenomena to Model
The physics of welding encompasses several key areas that are subject to modeling efforts. The arc itself is a central part of the welding process physics. Models aim to describe the dynamics of the arc, its interaction with the electrode and workpiece, and the generation of heat.
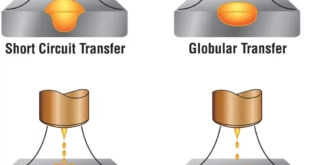
Metal transfer characteristics, particularly in consumable electrode processes like GMAW, are crucial phenomena to model, affecting how filler material is deposited into the weld pool. The weld pool, the common body of molten metal that solidifies to form the fusion bond, is another important subject of modeling, including its geometry and dynamics.
Modeling also addresses process voltages, heat and mass transfer, and how these factors influence the final weld characteristics.
Linking Input Parameters to Weld Outcomes
Modeling seeks to establish the relationships between the numerous input variables or Indirect Weld Parameters (IWP) and the resulting weld characteristics or Direct Weld Parameters (DWP).
IWP include variables that are set on the welding equipment, such as welding voltage, current, torch travel speed, wire-feed speed, travel angle, and electrode extension (stick-out). DWP are the outcomes related to the completed weld, including weld reinforcement, fusion zone geometry, mechanical properties, microstructure, and discontinuities.
The objective for a welder, or an automated system, is to determine the optimal setpoints for the IWP to achieve the desired DWP. Computer simulations can be used to investigate weld behavior, linking process inputs to outcomes like distortion.
Sensing in Arc Welding
The Role of Sensors
Sensing, or the measurement and monitoring of process parameters, is of primary importance for applying automatic control techniques to a physical system like a welding process.
A sensor in welding is an instrument or device, often integrated into a mechanized system, that transforms the value of a welding variable or the condition of the process into a form that can be accurately measured, typically electrical or electronic signals.
Key Variables for Monitoring
Effective monitoring targets a range of variables critical to weld quality and process control. Common needs for process monitoring in arc welding include sensing the arc length, weld seam, weld profile or geometry, temperature distribution, weld penetration, and the weld pool surface.
Geometric parameters of the workpiece, such as joint gap and weld position, are also targets for sensing technology. Sensing extends to quality parameters like the degree of penetration and the formation of the weld bead.
The temperature field and its dynamic process are considered key elements for ensuring weld quality, as temperature influences microstructure, mechanical properties, stresses, strains, and potential defects.
Real-time Monitoring
The complexity of welding processes necessitates real-time monitoring to capture dynamic changes and provide immediate feedback for control. Research continues in developing advanced sensing techniques, such as automated monitoring of the metal transfer process in GMAW, although this remains an area of ongoing development.
Optical and intelligent sensors are explored for sensing various aspects of the welding process. Examples of sensing applications include estimating the contact tip-to-workpiece distance and monitoring weld pool oscillation.
Automatic Control Strategies
The Control System Framework
The fundamental idea behind automatic control in welding is to adjust process inputs, potentially based on real-time measurements, to manage the heat and mass input to the weld pool and ultimately achieve desired weld characteristics.
The Gas Metal Arc Welding control problem, for instance, can be viewed as an interdisciplinary challenge involving system inputs, measured outputs, and intermediate factors that influence the final weld properties.
Controlling Key Parameters
Automatic control focuses on regulating the Indirect Weld Parameters (IWP) that directly influence the weld outcomes. This includes controlling arc voltage and current, which are fundamental to the arc welding circuit. For example, in submerged arc welding (SAW), voltage and current can be automatically controlled at preselected values.
Arc length control is often achieved automatically in SAW via a voltage feedback system based on a selected voltage reference. Wire feed speed is also a critical parameter, as it determines the deposition rate and, in some processes, influences the current.
Torch travel speed and angle are also subject to control to manage heat input and bead formation. In pulsed arc welding, control methods like QH-ARC 101, 102, and 103 utilize special output characteristics and automatic adjustment of pulsed and background current durations to confine the arc operating point and control arc length.
Examples of Control Methods
Various automatic control strategies have been proposed for welding processes, ranging from classical techniques like PI and PID control to more advanced adaptive and intelligent control methods.
Research explores specific control applications such as adaptive control systems for managing weld geometry or controlling arc current in robotic welding systems. Specific approaches might target controlling droplet detachment properties in GMAW to regulate heat and mass input or using low-frequency arc oscillation to improve weld quality.
Controlling the heat input in Gas Tungsten Arc Welding (GTAW) allows the operator (or an automated system) to manage root penetration.
Process-Specific Applications
Gas Metal Arc Welding (GMAW)
GMAW is one of the most frequently used arc welding processes and is particularly well-suited to automation using robots. Consequently, there is extensive research literature focused on the modeling, sensing, and control of the GMAW process.
Modeling efforts for GMAW cover aspects such as the physics of the arc, metal transfer characteristics, and the weld pool. Sensing research for GMAW includes monitoring parameters, process variables, and exploring sensors for arc length, weld pool geometry, and metal transfer.
Control strategies for GMAW aim to manage inputs like voltage, wire feed speed, and travel speed to influence outcomes like arc action, weld puddle control, bead shape, and penetration.
Submerged Arc Welding (SAW)
Submerged arc welding (SAW) is characterized as a high productivity mechanized process where the arc is covered by a layer of granular flux. In SAW, the voltage and current are automatically controlled at a preselected value.
The arc length is automatically maintained by a voltage feedback system, controlled from the reference or selected voltage. SAW can be performed using automatic twin or multiple electrode setups with specific parameters for current, voltage, and arc speed.
Gas Tungsten Arc Welding (GTAW)
Gas Tungsten Arc Welding (GTAW), also known as TIG, uses a non-consumable tungsten electrode and an inert gas shield, with the arc primarily serving as a heat source. The weld pool in GTAW is easily controlled, allowing for unbacked root passes.
The process uses parameters such as current, voltage (implied), arc length, and travel speed, which influence weld characteristics like bead width and depth of fusion. Control over heat input in GTAW, which can be achieved by adjusting parameters, enables control over root penetration.
Setting up a GTAW machine involves selecting parameters based on metal type and thickness, with technique parameters including torch position, angle, and distance from the workpiece. The arc is initiated and stopped by controlling the current, often with a remote control. The process requires careful current control during arc start and stop to manage the molten weld pool.
Conclusion
Modeling, sensing, and automatic control are transforming arc welding from a manual art to a precise science. Modeling provides insight into complex weld dynamics, sensing delivers real-time monitoring, and control systems dynamically adjust parameters for consistent quality. As research progresses, these technologies will continue to shape the future of automated welding, improving productivity, accuracy, and safety across industries.